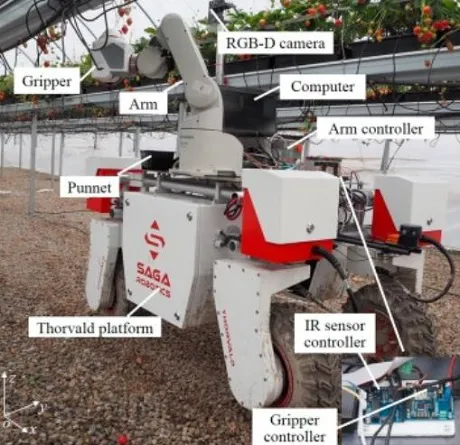
Scientists at the Norwegian University of Life Sciences, along with the Computer Science Department of Minnesota University, have developed and evaluated a robot for harvesting strawberries grown on table-tops in polytunnels. The robot consists of a newly-designed gripper mounted on an industrial arm which in turn is mounted on a mobile base along with an RGB-D camera. The novel cable-driven gripper can open fingers to “swallow” the fruit. Since it is designed to target the fruit not the stem, it just requires the fruit location for picking. The gripper is robust to the localisation errors introduced by the vision module and it has an internal container that is used to collect berries during picking.
Since the manipulator does not need to go back and forth between each berry and a separate punnet, picking time is reduced significantly. The vision system works to select ripe and reachable strawberries, which is fast for processing. These components are integrated into a complete system whose performance is analysed starting with the four main failure cases of the vision system: undetected, duplicate detections, inaccurate localisation and segmentation failure. The integration enables the robot to harvest continuously by moving the platform with a joystick.
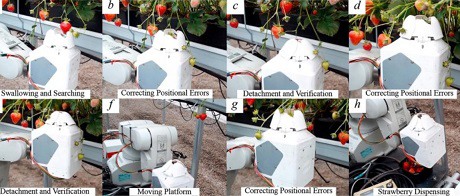
The system has been evaluated on the farm and the incidents of failure have been analysed. The picking cycle time is 7.5 s with a success rate of 53.6% in the farm setting. Most failures are found when picking strawberries in clusters, in which both the detection algorithm and the gripper struggle to separate the berries.
Source: Ya Xiong, Cheng Peng, Lars Grimstad, Pål Johan From, Volkan Isler, 'Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper', 2019, Computers and Electronics in Agriculture, Vol. 157, pages 392-402.